Search Results for author:
Found 18 papers, 4 papers with code
Addressing Limitations of State-Aware Imitation Learning for Autonomous Driving
We feed the state of the vehicle along with the representation of the environment as a special token of the transformer and propagate it throughout the network.


FLODCAST: Flow and Depth Forecasting via Multimodal Recurrent Architectures
We train the proposed model to also perform predictions for several timesteps in the future.

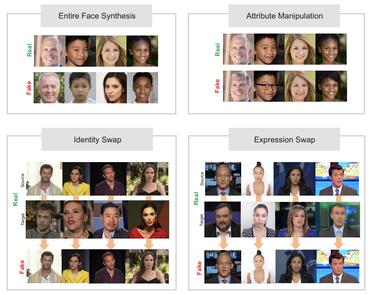
Deepfake detection by exploiting surface anomalies: the SurFake approach
In particular, when an image (video) is captured the overall geometry of the scene (e. g. surfaces) and the acquisition process (e. g. illumination) determine a univocal environment that is directly represented by the image pixel values; all these intrinsic relations are possibly changed by the deepfake generation process.

DiffDefense: Defending against Adversarial Attacks via Diffusion Models
This paper presents a novel reconstruction method that leverages Diffusion Models to protect machine learning classifiers against adversarial attacks, all without requiring any modifications to the classifiers themselves.

3D Pose Nowcasting: Forecast the Future to Improve the Present
Technologies to enable safe and effective collaboration and coexistence between humans and robots have gained significant importance in the last few years.

Forecasting Future Instance Segmentation with Learned Optical Flow and Warping
For an autonomous vehicle it is essential to observe the ongoing dynamics of a scene and consequently predict imminent future scenarios to ensure safety to itself and others.

Online Deep Clustering with Video Track Consistency
Several unsupervised and self-supervised approaches have been developed in recent years to learn visual features from large-scale unlabeled datasets.

SMEMO: Social Memory for Trajectory Forecasting
Effective modeling of human interactions is of utmost importance when forecasting behaviors such as future trajectories.
 Ranked #5 on
Trajectory Prediction
on Stanford Drone
Ranked #5 on
Trajectory Prediction
on Stanford Drone

Learning Group Activities from Skeletons without Individual Action Labels
To understand human behavior we must not just recognize individual actions but model possibly complex group activity and interactions.
 Ranked #8 on
Group Activity Recognition
on Volleyball
Ranked #8 on
Group Activity Recognition
on Volleyball
Multiple Future Prediction Leveraging Synthetic Trajectories
Trajectory prediction is an important task, especially in autonomous driving.

Explaining Autonomous Driving by Learning End-to-End Visual Attention
Current deep learning based autonomous driving approaches yield impressive results also leading to in-production deployment in certain controlled scenarios.
MANTRA: Memory Augmented Networks for Multiple Trajectory Prediction
Autonomous vehicles are expected to drive in complex scenarios with several independent non cooperating agents.

Text-to-Image Synthesis Based on Machine Generated Captions
To address this issue, in this paper we propose an approach capable of generating images starting from a given text using conditional GANs trained on uncaptioned images dataset.


Semantic Road Layout Understanding by Generative Adversarial Inpainting
Autonomous driving is becoming a reality, yet vehicles still need to rely on complex sensor fusion to understand the scene they act in.
Am I Done? Predicting Action Progress in Videos
In this paper we deal with the problem of predicting action progress in videos.

Deep Generative Adversarial Compression Artifact Removal
Moreover we show that our approach can be used as a pre-processing step for object detection in case images are degraded by compression to a point that state-of-the art detectors fail.

Segmentation Free Object Discovery in Video
In this paper we present a simple yet effective approach to extend without supervision any object proposal from static images to videos.
Automatic Image Annotation via Label Transfer in the Semantic Space
Automatic image annotation is among the fundamental problems in computer vision and pattern recognition, and it is becoming increasingly important in order to develop algorithms that are able to search and browse large-scale image collections.

