Using a Waffle Iron for Automotive Point Cloud Semantic Segmentation
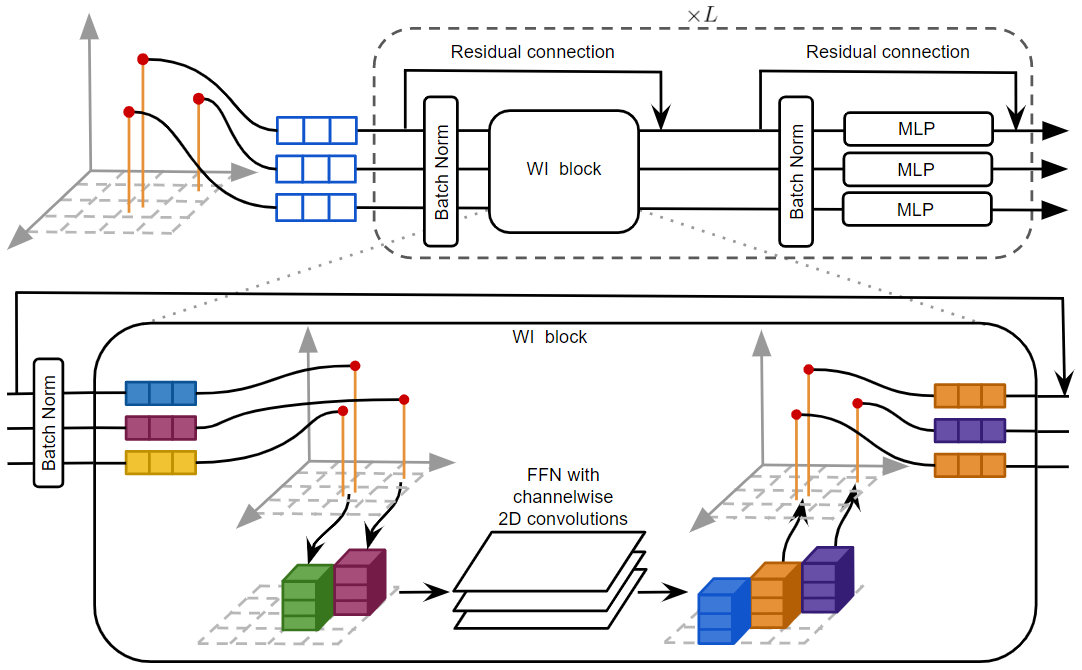
Semantic segmentation of point clouds in autonomous driving datasets requires techniques that can process large numbers of points efficiently. Sparse 3D convolutions have become the de-facto tools to construct deep neural networks for this task: they exploit point cloud sparsity to reduce the memory and computational loads and are at the core of today's best methods. In this paper, we propose an alternative method that reaches the level of state-of-the-art methods without requiring sparse convolutions. We actually show that such level of performance is achievable by relying on tools a priori unfit for large scale and high-performing 3D perception. In particular, we propose a novel 3D backbone, WaffleIron, made almost exclusively of MLPs and dense 2D convolutions and present how to train it to reach high performance on SemanticKITTI and nuScenes. We believe that WaffleIron is a compelling alternative to backbones using sparse 3D convolutions, especially in frameworks and on hardware where those convolutions are not readily available.
PDF Abstract ICCV 2023 PDF ICCV 2023 AbstractCode






Datasets
 nuScenes
nuScenes
 SemanticKITTI
SemanticKITTI
 SemanticKITTI-C
SemanticKITTI-C
Results from the Paper
 Ranked #4 on
LIDAR Semantic Segmentation
on nuScenes
(val mIoU metric)
Ranked #4 on
LIDAR Semantic Segmentation
on nuScenes
(val mIoU metric)
