The 1st-place Solution for CVPR 2023 OpenLane Topology in Autonomous Driving Challenge
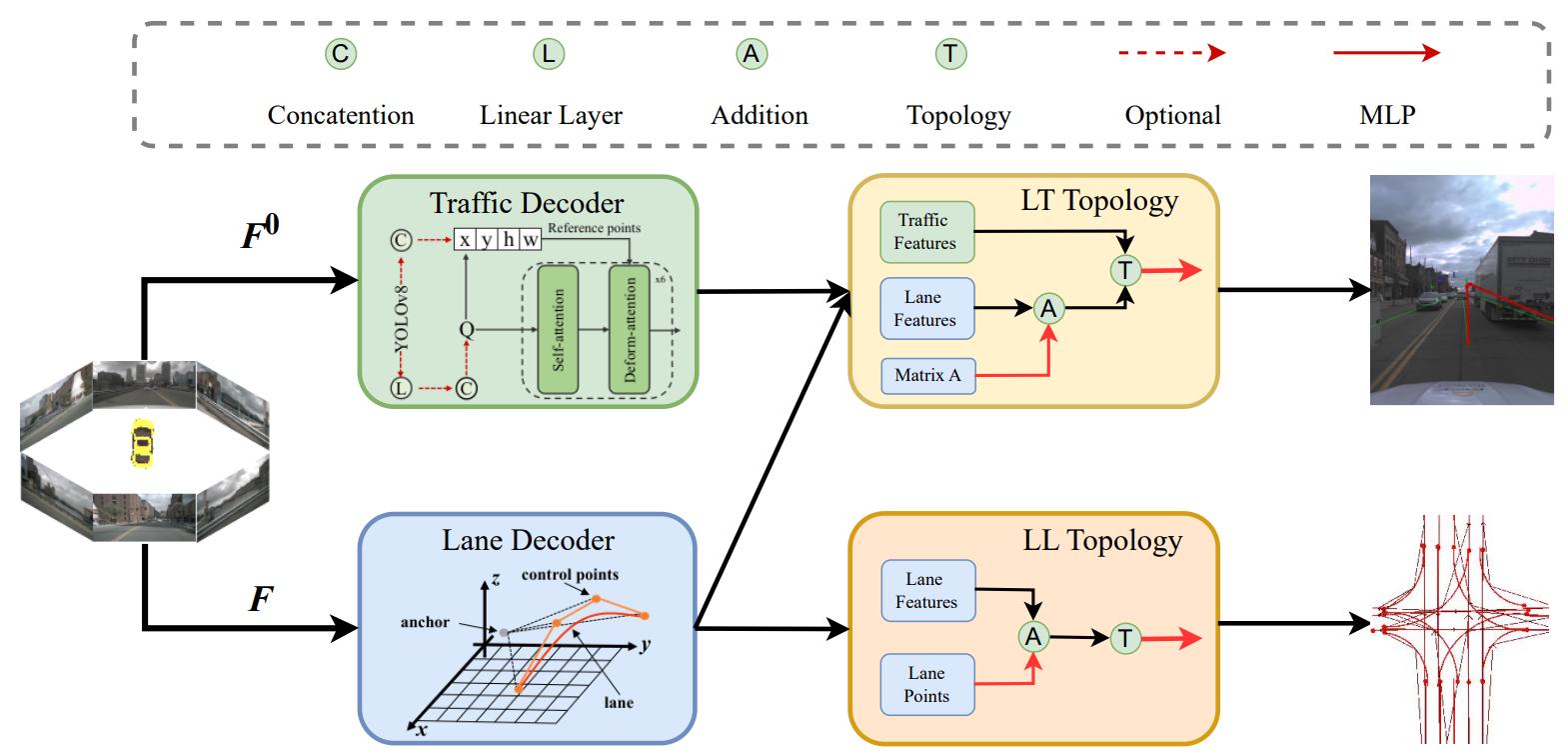
We present the 1st-place solution of OpenLane Topology in Autonomous Driving Challenge. Considering that topology reasoning is based on centerline detection and traffic element detection, we develop a multi-stage framework for high performance. Specifically, the centerline is detected by the powerful PETRv2 detector and the popular YOLOv8 is employed to detect the traffic elements. Further, we design a simple yet effective MLP-based head for topology prediction. Our method achieves 55\% OLS on the OpenLaneV2 test set, surpassing the 2nd solution by 8 points.
PDF AbstractCode

Tasks

Datasets
 OpenLane-V2 val
OpenLane-V2 val
 OpenLane-V2 test
OpenLane-V2 test
Results from the Paper
Submit
results from this paper
to get state-of-the-art GitHub badges and help the
community compare results to other papers.
Methods
No methods listed for this paper. Add
relevant methods here
