Instance-Based Uncertainty Estimation for Gradient-Boosted Regression Trees
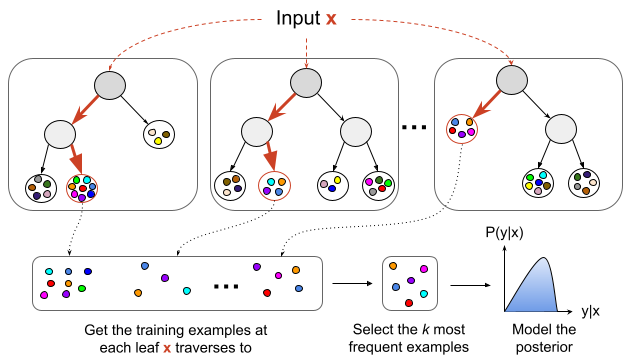
Gradient-boosted regression trees (GBRTs) are hugely popular for solving tabular regression problems, but provide no estimate of uncertainty. We propose Instance-Based Uncertainty estimation for Gradient-boosted regression trees (IBUG), a simple method for extending any GBRT point predictor to produce probabilistic predictions. IBUG computes a non-parametric distribution around a prediction using the $k$-nearest training instances, where distance is measured with a tree-ensemble kernel. The runtime of IBUG depends on the number of training examples at each leaf in the ensemble, and can be improved by sampling trees or training instances. Empirically, we find that IBUG achieves similar or better performance than the previous state-of-the-art across 22 benchmark regression datasets. We also find that IBUG can achieve improved probabilistic performance by using different base GBRT models, and can more flexibly model the posterior distribution of a prediction than competing methods. We also find that previous methods suffer from poor probabilistic calibration on some datasets, which can be mitigated using a scalar factor tuned on the validation data. Source code is available at https://www.github.com/jjbrophy47/ibug.
PDF Abstract
