GPRAR: Graph Convolutional Network based Pose Reconstruction and Action Recognition for Human Trajectory Prediction
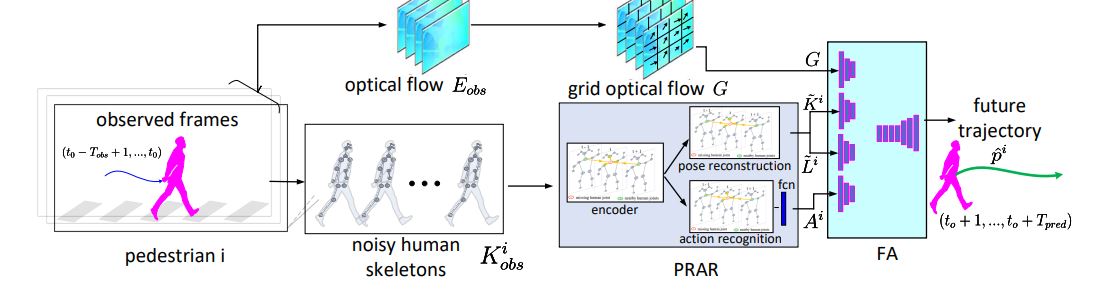
Prediction with high accuracy is essential for various applications such as autonomous driving. Existing prediction models are easily prone to errors in real-world settings where observations (e.g. human poses and locations) are often noisy. To address this problem, we introduce GPRAR, a graph convolutional network based pose reconstruction and action recognition for human trajectory prediction. The key idea of GPRAR is to generate robust features: human poses and actions, under noisy scenarios. To this end, we design GPRAR using two novel sub-networks: PRAR (Pose Reconstruction and Action Recognition) and FA (Feature Aggregator). PRAR aims to simultaneously reconstruct human poses and action features from the coherent and structural properties of human skeletons. It is a network of an encoder and two decoders, each of which comprises multiple layers of spatiotemporal graph convolutional networks. Moreover, we propose a Feature Aggregator (FA) to channel-wise aggregate the learned features: human poses, actions, locations, and camera motion using encoder-decoder based temporal convolutional neural networks to predict future locations. Extensive experiments on the commonly used datasets: JAAD [13] and TITAN [19] show accuracy improvements of GPRAR over state-of-theart models. Specifically, GPRAR improves the prediction accuracy up to 22% and 50% under noisy observations on JAAD and TITAN datasets, respectively
PDF Abstract



