CRAT-Pred: Vehicle Trajectory Prediction with Crystal Graph Convolutional Neural Networks and Multi-Head Self-Attention
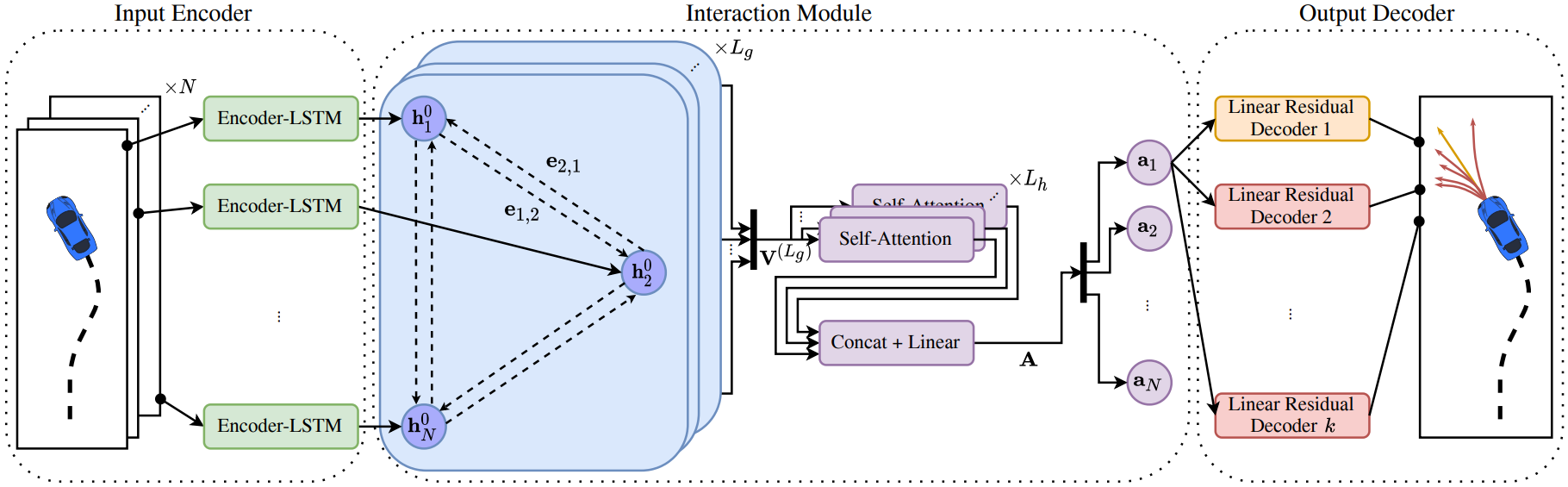
Predicting the motion of surrounding vehicles is essential for autonomous vehicles, as it governs their own motion plan. Current state-of-the-art vehicle prediction models heavily rely on map information. In reality, however, this information is not always available. We therefore propose CRAT-Pred, a multi-modal and non-rasterization-based trajectory prediction model, specifically designed to effectively model social interactions between vehicles, without relying on map information. CRAT-Pred applies a graph convolution method originating from the field of material science to vehicle prediction, allowing to efficiently leverage edge features, and combines it with multi-head self-attention. Compared to other map-free approaches, the model achieves state-of-the-art performance with a significantly lower number of model parameters. In addition to that, we quantitatively show that the self-attention mechanism is able to learn social interactions between vehicles, with the weights representing a measurable interaction score. The source code is publicly available.
PDF AbstractCode



Datasets
 Argoverse
Argoverse

| Task | Dataset | Model | Metric Name | Metric Value | Global Rank | Benchmark |
|---|---|---|---|---|---|---|
| Motion Forecasting | Argoverse CVPR 2020 | CRAT-Pred | MR (K=6) | 0.2624 | # 122 | |
| minADE (K=1) | 1.8162 | # 160 | ||||
| minFDE (K=1) | 4.0576 | # 154 | ||||
| MR (K=1) | 0.6323 | # 146 | ||||
| minADE (K=6) | 1.0626 | # 134 | ||||
| minFDE (K=6) | 1.8981 | # 125 | ||||
| DAC (K=6) | 0.9558 | # 209 | ||||
| brier-minFDE (K=6) | 2.5926 | # 174 |
