The NAO Backpack: An Open-hardware Add-on for Fast Software Development with the NAO Robot
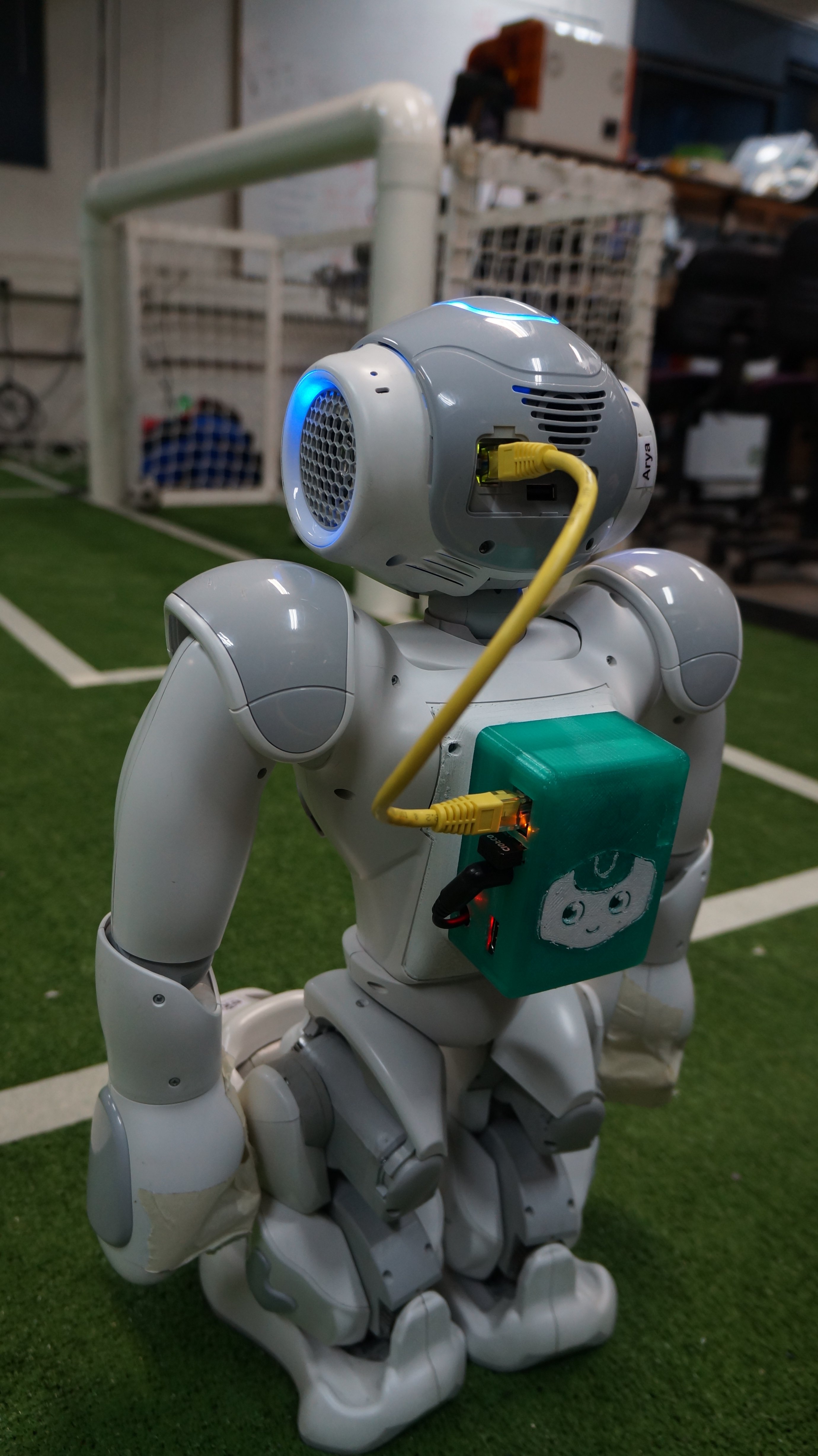
We present an open-source accessory for the NAO robot, which enables to test computationally demanding algorithms in an external platform while preserving robot's autonomy and mobility. The platform has the form of a backpack, which can be 3D printed and replicated, and holds an ODROID XU4 board to process algorithms externally with ROS compatibility. We provide also a software bridge between the B-Human's framework and ROS to have access to the robot's sensors close to real-time. We tested the platform in several robotics applications such as data logging, visual SLAM, and robot vision with deep learning techniques. The CAD model, hardware specifications and software are available online for the benefit of the community: https://github.com/uchile-robotics/nao-backpack
PDF Abstract